
electronique-news.com
27
'20
Written on Modified on
Pour IDS, la vigilance est de mise
Détection 3D automatique et marquage de poutres en bois.

L'entreprise Schumann propose un service d'usinage entièrement automatique grâce à une scierie et des commerces de bois affiliés. Les poutres y sont produites dans des versions très variées. Jusqu'à ce jour, elles étaient toutes marquées manuellement. Le marquage intervient ici pour identifier numériquement un bordereau de bois de construction personnalisé répondant au besoin d'un client, en général le charpentier. En outre, le système peut par exemple servir aussi à signaler des certifications (durabilité, origine) ou des tris (par qualité, épaisseur, degré de séchage et utilisation prévue). Pour automatiser le processus de marquage, un système intégrant un robot industriel, une caméra 3D et un système compact d'impression à jet d'encre a été développé. La solution permet de déterminer automatiquement les surfaces d'impression éventuelles, de sélectionner la position de marquage, d'aligner au mieux la police et de définir sa taille.

Figure 1 Résultat de l'usinage : empilement de poutres taillées sur mesure par le système et marquées automatiquement.
Pour être bien visible ultérieurement sur une palette, le marquage doit être réalisé le plus possible sur la face avant de la poutre. La caméra doit alors détecter la forme et la position de la poutre : chaque poutre dispose par exemple de chanfreins, tenons ou rainures différents dans la zone d'impression. De plus, la position des poutres face au robot n'est jamais identique en raison de la variance ou des tolérances dans le système de production en amont. Un système de traitement d'image avec lequel le robot peut détecter rapidement, efficacement et précisément la position et les surfaces 3D de chaque poutre est alors nécessaire.
Pour détecter la position et la géométrie des poutres, une caméra Ensenso N35 est utilisée. Dès que le bois se trouve à la position de marquage, le robot place automatiquement la caméra montée sur la bride de façon à ce qu'elle puisse détecter les surfaces de la poutre. Si nécessaire, la caméra est positionnée par le robot à plusieurs endroits autour de la poutre pour obtenir des vues variées des différents côtés de la poutre.

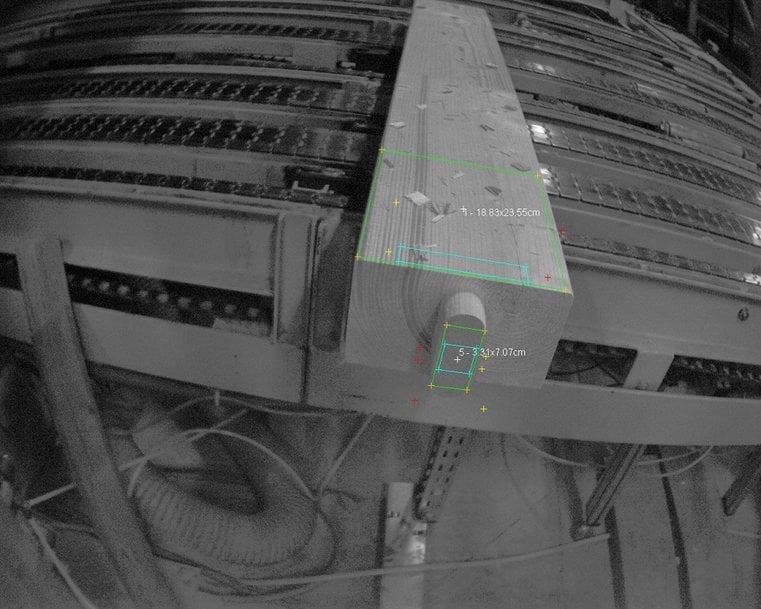
Figure 2 : Surfaces d'impression éventuelles (en vert) déterminées par le logiciel à partir des données 3D brutes et position de marquage établie (en turquoise).
La caméra visualise le sommet des poutres en bois à une distance moyenne (~ 40-90 cm) des différentes perspectives obliques. Elle est dotée de deux capteurs CMOS monochromes (obturateur global, 1280 x 1024 pixels), d'une interface GigE, de connecteurs vissables GPIO pour le déclencheur et le flash ainsi que d'un projecteur. La technologie Flex View intégrée au modèle N35 est particulièrement adaptée à l’acquisition 3D d’objets fixes et aux distances de travail allant jusqu’à 3 000 mm. La position du masque de projecteur dans le rayon lumineux peut être déplacée linéairement par très petits pas. La texture projetée se déplace ainsi parallèlement sur les surfaces des objets de la scène et crée d’autres structures de soutien.
Plusieurs paires d’images de la même scène statique avec différentes structures sont acquises, ce qui crée un bien plus grand nombre de pixels. La résolution s’en trouve augmentée. Parallèlement à la résolution, la robustesse des données augmente aussi pour les surfaces difficiles, puisque les structures de motif décalées apportent des informations supplémentaires. La caméra Ensenso N35 répond ainsi aux attentes du client : l'acquisition la plus précise et silencieuse possible des surfaces en bois.
Le système développé par l'association ZfT convertit les données brutes acquises, détermine la position du nuage de points dans le système de coordonnées du robot et extrait les niveaux éventuellement adaptés au marquage sur les poutres. À partir de ces données, la position de marquage ainsi que la taille et l'alignement optimaux du texte prescrit sont calculés. Le robot se déplace ensuite aux positions de marquage déterminées à l'aide du système de caméra et exécute avec précision le marquage à l'aide de l'imprimante à jet d'encre.
« Ce qui a été déterminant dans le choix de la caméra, c'est son exactitude de mesure dans le volume de détection, ainsi que la vitesse de la mesure », explique Florian Leutert, assistant de recherche chez ZfT. « Les autres avantages sont la compacité de la caméra N35 ainsi que la protection contre la poussière/l'humidité. » La classe de protection est essentielle dans le cadre du travail du bois dans une scierie. Pour cette raison, le boîtier en aluminium compact et robuste de la caméra 3D Ensenso N35 est parfaitement adapté. La caméra satisfait aux exigences de la classe de protection IP65/67, elle est donc protégée des saletés, de la poussière, des projections d'eau et de l'encre, dans ce cas précis.
Le kit de développement logiciel Ensenso compris dans la fourniture est utilisé pour paramétrer la caméra ainsi que pour déclencher la mesure et la lecture du nuage de points 3D mesuré. Pour transformer et traiter les données, l'association ZfT a développé son propre logiciel.
Perspectives

Figure 3 Balayage d'une poutre avec coupe oblique placée devant le robot par le système de production.
« En robotique, des solutions d'automatisation fixes sont de plus en plus nécessaires tout comme des systèmes de traitement automatiques, capables de traiter en souplesse diverses pièces et divers environnements », c'est ainsi que Florian Leutert définit les exigences à venir. Pour cela, des caméras de très grande qualité sont utilisées, car l'espace de travail doit être capturé en 3D avec la précision requise par le système robotique, c'est-à-dire avec une précision la plus proche possible de l'ordre du sous-millimètre. Aucun problème pour les modèles 3D stéréo Ensenso d'IDS : la vision 3D est à la fois simple et robuste, mais ne fait pas l'impasse sur la rapidité et la précision. Ces modèles sont des composants fiables et prometteurs pour l'acquisition automatique en 3D de différentes pièces, et pas seulement en tant que vigile aguerri de l'industrie de transformation du bois.
Client
L'association Zentrum für Telematik e.V. informe de manière indépendante et fiable l'industrie quant aux opportunités offertes par l'usage des techniques télématiques. Elle propose notamment à l'industrie une aide lors du développement de produits et de services innovants. Les points forts de l'application résident dans la télémaintenance et la mise en service à distance d'installations industrielles, avec la surveillance de sécurité, l'aide d'assistants lors de situations dangereuses, dans la télémédecine, la formation ouverte à distance et la gestion du trafic. http://www.telematik-zentrum.de
Ensenso N35 - La vision 3D rapide et précise

• Interface GigE – utilisation universelle et flexible
• Boîtier en aluminium compact et robuste
• IP65/67
• Capteurs CMOS à obturateur global et projecteur de motifs, LED bleues ou infrarouges au choix
• Images/s max. (3D) : 10 (2 x compartimentage : 30) et 64 disparités
• Images/s max. (traitement hors ligne) : 30 (2 x compartimentage : 70) et 64 disparités
• Conception pour des distances de travail de 3 000 mm (N35) maximum et des champs d’images variables
• Production d’un nuage unique de points 3D pour toutes les caméras utilisées dans les applications à caméras multiples
• Composition en direct des nuages de points 3D de différentes perspectives
• Technologie FlexView intégrée pour une précision du nuage de points et une robustesse des données 3D provenant de surfaces difficiles encore plus grandes
• Mode « Projected Texture Stereo Vision » pour la capture de surfaces déstructurées
• Capture d’objets statiques ou en mouvement
www.ids-imaging.fr
