
electronique-news.com
25
'23
Written on Modified on
Quatre « yeux » valent mieux que deux
Quatre caméras 3D Ensenso de la société IDS Imaging Development Systems GmbH fournissent les données de base et constituent ainsi le socle de l'automatisation des processus.

Application
Le processus de travail proprement dit, qui doit être automatisé à l'aide de FrameSense, fait partie de nombreuses opérations de fabrication. Un composant sort d'une machine - ici une presse - et se déplace sur un tapis roulant vers un conteneur. Il y est empilé. Dès que le conteneur est plein, il est transporté avec celui-ci vers la prochaine étape de production, par exemple le montage dans un véhicule.
Jusqu'à présent, les collaborateurs se chargeaient de la mise en place dans le conteneur. Cette tâche partielle, relativement simple, est plus complexe qu'il n'y paraît à première vue. Outre le processus d'insertion lui-même, il faut d'abord déterminer l'espace libre adéquat pour la pièce. Parallèlement, il faut éliminer les éventuels facteurs perturbateurs, comme les verrouillages, et procéder à un contrôle général de la « caisse de chargement » pour détecter d'éventuels défauts.
Toutes ces tâches doivent désormais être prises en charge par un robot équipé d'un système de vision - un défi technologique. En effet, les conteneurs proviennent en outre de différents fabricants, sont de types différents et varient donc en partie dans leurs dimensions.

Les robots doivent travailler au millimètre près lors de l'insertion des composants dans les peignes des châssis.
Contrôle du type, de la forme et de la position à l'aide de quatre caméras 3D
Pour leur chargement et déchargement entièrement automatiques, la position de plusieurs caractéristiques pertinentes des conteneurs doit donc être déterminée pour une correction dite multi-vectorielle du robot. La base est un contrôle du type, de la forme et de la position de chaque conteneur. Ce n'est qu'ainsi que l'on peut garantir la sécurité du processus et l'absence de collision lors du guidage du robot de chargement. Tout cela doit être intégré dans le processus de production existant. Les retards doivent être exclus et le positionnement des composants doit se faire au millimètre près.
Pour y remédier, VMT utilise pas moins de quatre caméras 3D par système. Les quatre capteurs enregistrent chacun une partie de l'ensemble du champ de vision. Celui-ci peut être composé de deux conteneurs mesurant chacun environ 1,5 x 2 x 1,5 mètres (P x L x H). Deux caméras regardent toujours le même conteneur. Cela permet d'obtenir des données à partir de deux perspectives pour un nuage de points 3D plus détaillé. Les nuages de points des quatre capteurs sont combinés pour l'analyse ultérieure. Des caractéristiques pertinentes du conteneur sont enregistrées dans les zones d’intérêt (ROI, Regions of Interest) du nuage de points global. Un enregistrement est la détermination précise de la position d'une caractéristique à l'aide d'un modèle dans les 6 degrés de liberté. Dans d'autres ROI, on recherche les contours perturbateurs qui pourraient entraîner des collisions lors du chargement. Enfin, l'image globale est comparée à un modèle de référence enregistré. Il est ainsi possible de contrôler simultanément et de manière entièrement automatisée l'état et la position des conteneurs. Même les conteneurs livrés déformés ou positionnés en biais peuvent être traités. Toutes ces informations sont également enregistrées pour être utilisées dans un système de gestion de la qualité, qui permet de tracer l'état de tous les conteneurs. Le calibrage ainsi que le regroupement des données de mesure et leur évaluation ultérieure sont effectués dans un IPC (ordinateur industriel) spécifique avec visualisation à l'écran, éléments de commande ainsi que connexion à la commande de robot correspondante.
Le résultat principal de la solution de traitement d’image est la correction multivectorielle. Le robot est alors corrigé de manière à ce qu'il puisse placer le composant à la position de stockage la plus proche et la plus appropriée. Les résultats secondaires sont des messages d'erreur dus à la présence d'arêtes ou d'objets perturbateurs dans le conteneur, qui empêcheraient le remplissage. Les conteneurs endommagés, dont l'état général est trop mauvais, peuvent être identifiés et éliminés à l'aide des données. Le traitement d'image a lieu dans le logiciel de traitement d'image MSS (Multi Sensor Systems) développé par VMT. FrameSense est conçu pour être facile à utiliser et peut également être modifié directement sur place pour d'autres composants.
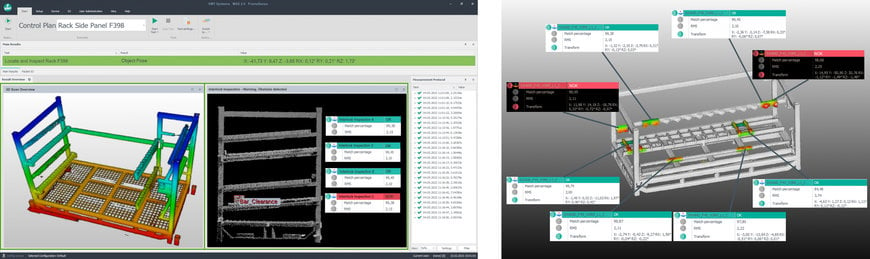
Analyse et visualisation des données de mesure
Système de caméra 3D robuste
Côté caméras, VMT mise sur les caméras 3D Ensenso - dans un premier temps sur le modèle X36. Le développement actuel de FrameSense est équipé de la variante Ensenso C. Les raisons de ce changement sont avant tout une meilleure performance du projecteur - grâce à un nouveau procédé de projection - ainsi qu'une vitesse de capture plus élevée. De plus, l'Ensenso C permet un plus grand volume de mesure. Un critère important pour FrameSense, car le robot ne peut s'approcher des conteneurs à remplir que jusqu'à une certaine distance. Les spécifications de l'Ensenso C correspondent donc exactement aux exigences de VMT, comme l'explique Andreas Redekop, chef de projet et responsable technologique : « Une puissance et une résolution élevées du projecteur, associées à un traitement rapide des données, ont été nos principaux critères techniques lors du choix de la caméra. De plus, le fait d'être installé dans un boîtier fixe était également un avantage. »

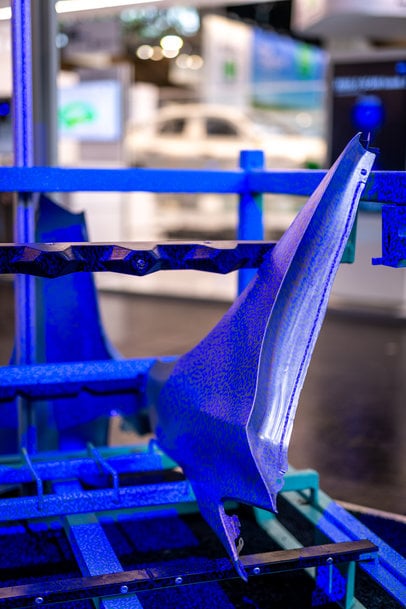
Soutenue par un projecteur très lumineux, la caméra Ensenso C projette des textures très contrastées sur l'objet à représenter
La caméra Ensenso C répond aux défis actuels de l'industrie de l'automatisation et de la robotique. Par rapport aux autres modèles Ensenso, elle fournit des informations sur les couleurs aussi bien en 3D qu’en RVB. Les clients bénéficient ainsi de données d'image encore plus précises. Le boîtier du système de caméra 3D robuste remplit les conditions de la classe de protection IP65/67. Doté d’une résolution de 5 MP, il est disponible avec des lignes de base allant actuellement jusqu'à environ 455 mm. Ainsi, même les objets de grande taille peuvent être détectés de manière fiable. La caméra est rapidement et facilement opérationnelle. Elle est destinée avant tout aux applications à grand volume, par exemple dans les techniques médicales, la logistique ou l'automatisation de la fabrication.

Quatre caméras Ensenso C capturent les contours des bacs de garbage
Perspectives
Grâce au chargement et au déchargement automatiques des conteneurs et à l'inspection 3D intégrée des conteneurs, il est possible d'automatiser les postes de travail manuels à l'aide de FrameSense. Dans le contexte de la pénurie de main-d'œuvre qualifiée, le système peut donc apporter une contribution importante à l'automatisation des processus, entre autres dans l'industrie automobile. Il répond ainsi aux défis prépondérants de l'industrie. La caméra Ensenso C offre à cet effet la base décisive pour la génération de données et dépasse les exigences de nombreuses applications. Lukas Neumann, de la gestion des produits, voit leur valeur ajoutée particulièrement ici : « La grande puissance du projecteur et les hautes résolutions des capteurs sont particulièrement avantageuses dans le domaine de l'intralogistique. Ici, il faut saisir des composants de haute précision à une grande distance avec un grand volume de mesure. » Pour d'autres applications de dépilage ou de bin picking dans la logistique classique, il pourrait imaginer une caméra similaire avec une puissance de projection élevée, mais une résolution moindre et une prise de vue rapide.
Rien ne s'oppose donc à d'autres développements et solutions d'automatisation en lien avec des robots « voyants ».
Caméra

Ensenso C: Vision 3D en couleur
Modèle utilisé : Ensenso C57-8-M
www.ids-imaging.fr
Client
La société VMT Vision Machine Technic Bildverarbeitungssysteme GmbH fournit des systèmes de traitement d'image et de capteurs laser individuels, clés en main, pour tous les secteurs industriels. Les solutions système sont basées sur des lignes de produits développées en interne, qui couvrent l'ensemble des applications. En tant que centre de compétences au sein de la puissante association du groupe Pepperl+Fuchs, VMT offre une technologie de pointe absolue, combinée à une sécurité d'investissement maximale.
www.ids-imaging.com
This email address is being protected from spambots. You need JavaScript enabled to view it.
