
Précision numérique dans la construction aéronautique
La caméra 3D Ensenso d’IDS permet un positionnement précis des points d'installation.
en.ids-imaging.com
Dans la production aéronautique moderne, la précision est essentielle. Chaque perçage, chaque point de fixation doit être parfaitement positionné afin de garantir la sécurité et la qualité. Dans le cadre du projet DiCADeMA (Digital Cabin Architectures and Design for Manufacturing) de l’Agence Spatiale Allemande (DLR), un processus novateur, entièrement numérisé et connecté, a été développé. Grâce à lui, la fabrication de cabines d'avion atteint un nouveau niveau grâce à l'automatisation intelligente. Une caméra 3D Ensenso de la société IDS Imaging Development Systems GmbH joue un rôle important dans ce processus, car elle assure la détection et l'alignement ultraprécis des positions de perçage.
Chaîne numérique complète, de la conception à la production
L'objectif du projet est de créer une continuité numérique entre la conception et la fabrication. Les modifications dans la conception de la cabine, notamment en ce qui concerne l'espacement des sièges et le nouveau positionnement des compartiments à bagages qui en découle, sont directement enregistrées dans les données de conception numériques et automatiquement intégrées dans la planification de la production. Les simulations permettent de tester ces variantes avant même qu'un composant physique ne soit fabriqué. Une fois la validation numérique terminée, la production peut commencer immédiatement.
Afin de rendre ce processus numérique tangible, un système automatisé de marquage des positions de perçage a été développé sur une maquette de structure de châssis d'avion. Ici, plusieurs systèmes interconnectés fonctionnent en étroite collaboration : Un robot mobile autonome (AMR) se déplace vers le châssis d’avion et se positionne à proximité du point cible. Sur celui ci est monté un robot léger qui positionne l'unité de marquage ainsi que la caméra 3D dans la position de prise de vue. C'est là que la caméra Ensenso effectue le travail de précision. Un système d’exécution de la fabrication (MES) intégré pilote l’ensemble des sous processus.
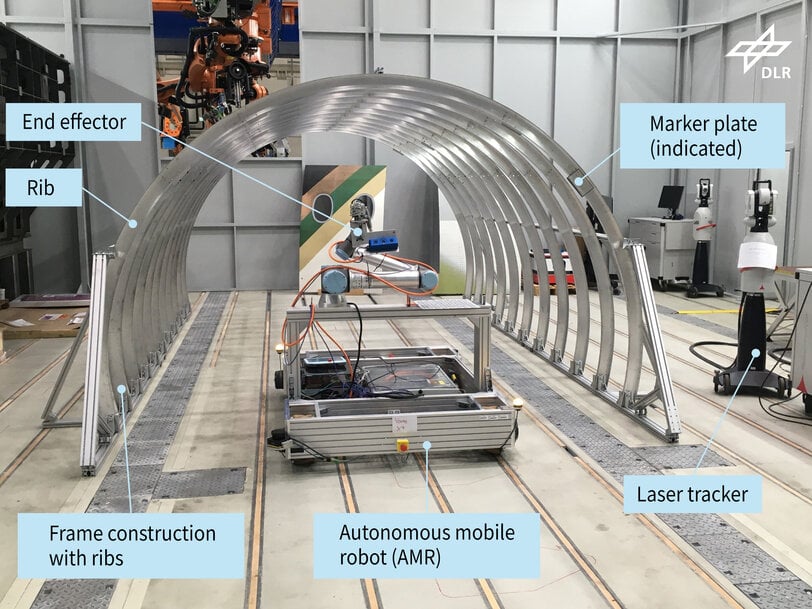
Construction du châssis et robot mobile, y compris ses modules d’intégration
Le rôle de la caméra 3D
La caméra utilisée, une Ensenso N36, capture l'environnement sous forme de nuage de points tridimensionnel et le compare aux données CAO du châssis de l'avion. De cette manière, même les plus petites divergences entre le modèle théorique et la géométrie réelle peuvent être détectées. À partir de ces données, le système calcule des valeurs de correction précises qui sont transmises au MES supérieur. La communication s'effectue via une interface OPC UA standardisée qui permet un échange de données fluide et sécurisé entre la caméra, le robot et le système de commande. Le MES convertit les informations obtenues en commandes de contrôle concrètes pour le robot, qui procède alors au marquage du point de perçage.
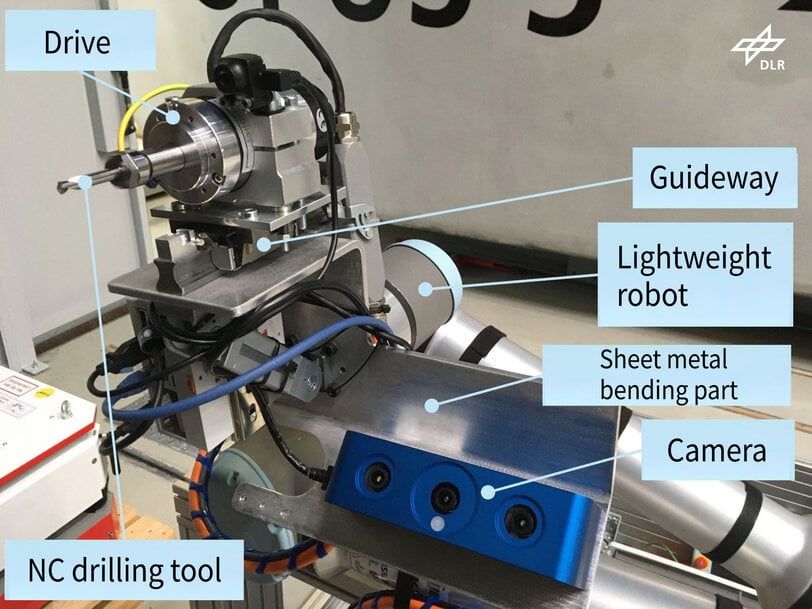
Robot léger équipé d'une unité de marquage et d'une caméra 3D
Le robot autonome atteint une précision de positionnement d'environ cinq millimètres. Cela permet d'atteindre la position de prise de vue de la caméra sans risque de collision.
La caméra Ensenso constitue un lien essentiel entre la conception numérique et la fabrication réelle : Elle détecte les géométries locales, ici plusieurs rivets ainsi que la surface sur laquelle ils ont été posés, et compare les nuages de points acquis avec les données de référence issues du modèle CAO. Cette comparaison est rendue possible, entre autres, grâce à l'étalonnage œil-main et à un procédé de minimisation itératif. Le résultat fourni est une matrice de transformation qui décrit la correction exacte de la position de perçage. La position de perçage est ajustée à l'aide de la valeur de correction et peut être définie avec précision.
Un ouvrier suit le véhicule et perce le trou immédiatement après être passé à l'endroit marqué. Ce processus est répété pour chaque point d’installation, tandis que le robot et l’opérateur peuvent travailler en toute sécurité à proximité immédiate l’un de l’autre.
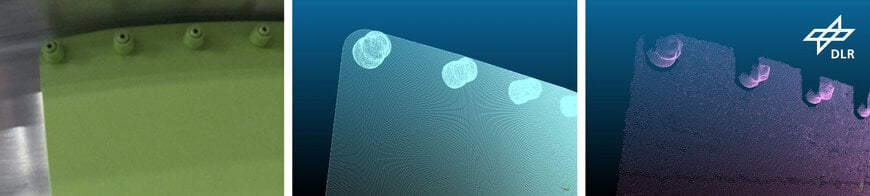
Différentes vues d'une plaque avec rivets : plaque réelle (à gauche), nuage de points CAO (au centre), nuage de points de la caméra 3D (à droite)
Pour l'application présentée ici dans le domaine de la construction aéronautique, une caméra compacte avec une distance focale très courte est nécessaire afin de réduire au maximum la distance entre la position de prise de vue et la position de perçage. Cela permet de maintenir une grande précision tout en évitant des mouvements excessifs du robot. L’Ensenso N36 offre ces caractéristiques. La série N d'Ensenso a été spécialement conçue pour une utilisation dans des conditions environnementales difficiles. Grâce à sa conception compacte, elle peut être installée de manière peu encombrante, aussi bien de manière fixe que mobile, sur un bras robotisé. Elle convient donc aussi bien à la capture 3D d'objets en mouvement qu'à celle d'objets statiques. Le projecteur intégré garantit une texture contrastée, même dans des conditions d'éclairage difficiles : À l’aide d’un masque de projection comportant un motif aléatoire de points, il projette des structures supplémentaires sur la surface de l’objet, complétant ainsi les caractéristiques manquantes ou faiblement présentes. Toutes les caméras sont précalibrées en usine et peuvent donc être mises en service rapidement et facilement.
Avantages pour la production
Le processus numérique offre plusieurs avantages au DLR. L'alignement assisté par caméra augmente considérablement la précision et la répétabilité. Parallèlement, la saisie continue des données permet une documentation et une traçabilité complètes des étapes de travail. Le personnel de montage est soulagé, car le robot prend en charge la détermination, longue et fastidieuse, des positions, tandis que les spécialistes peuvent se concentrer sur l’opération d’assemblage proprement dite. S’y ajoute une nette réduction des temps de production, puisqu’aucune mesure manuelle ni aucun réajustement ne sont désormais nécessaires.
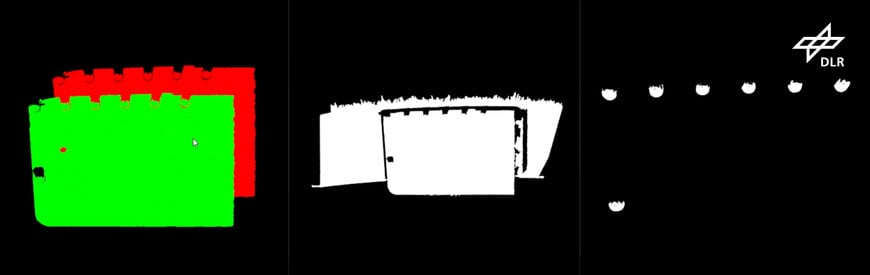
Nuages de points en comparaison nominale–réelle
Perspectives
La démonstration réalisée sur la maquette montre tout le potentiel qu’offre la combinaison de la chaîne de processus numérique, de la robotique et du traitement d’images 3D. Dans les prochaines étapes du projet, la précision du système et la performance des algorithmes d'évaluation seront examinées de manière plus approfondie. Il ne s'agit pas seulement de la caméra elle-même, mais aussi de l'optimisation des procédés mathématiques utilisés pour aligner les nuages de points théoriques et réels.
Ce qui est actuellement testé dans la construction aéronautique pourrait également être utilisé dans d'autres industries à l'avenir. Le système démontre de manière impressionnante comment les capteurs optiques et les logiciels intelligents ouvrent ensemble la voie à une nouvelle ère de fabrication : connectée, efficace et d’une précision parfaite.
Pour plus d'informations, regardez la vidéo du projet : https://www.youtube.com/watch?v=rtJUdiuvUOU
Client
L’Agence Spatiale Allemande (DLR) est le centre de recherche de la République fédérale d'Allemagne dans le domaine de l'aéronautique et de l'astronautique. Ses activités de recherche et de développement dans les domaines de l’aéronautique, de l’espace, de l’énergie, des transports et de la sécurité s’inscrivent dans des coopérations nationales et internationales.
https://www.dlr.de/en
Projet DiCADeMA
Caméra :
Caméra 3D Ensenso

Modèle utilisé : Ensenso N36
Vers la famille de caméras
Droits d'image :
Deutsches Zentrum für Luft- und Raumfahrt e.V., tous droits réservés.
© 2026 IDS Imaging Development Systems GmbH
