
Les technologies de capteurs pour véhicules autonomes
Par Mark Patrick, Mouser Electronics.
différentes technologies de capteurs utilisées dans les véhicules autonomes et leurs caractéristiques
Quels seront les thèmes abordés par cette série d’articles de blog ?
- Dans quelle mesure la conduite autonome transforme-t-elle le paysage de l’industrie automobile ?
- Surmonter les perceptions et adopter les technologies de conduite autonome.
- Automatisation des véhicules : les étapes clés.
- Les technologies de capteurs pour véhicules autonomes.
- V2V et V2I : des données critiques pour les véhicules autonomes.
- Établissement d’un cadre éthique pour les véhicules autonomes.
Les technologies de capteurs pour véhicules autonomes
Pour se déplacer en toute sécurité, un véhicule autonome doit comprendre ce qui l’entoure. Sans cette connaissance de leur environnement, les véhicules autonomes ne peuvent pas satisfaire aux attentes de la société en matière de sécurité routière. Les véhicules autonomes ne pourront répondre aux attentes des passagers qu’ils embarquent et dissiper les inquiétudes du grand public à leur encontre qu’à condition d’être dotés de systèmes capables de balayer leur environnement à 360°.
Or, deux technologies en particulier sont indispensables pour « donner la vue » à un véhicule. En premier lieu, les capteurs. Différents types de capteurs peuvent assurer la détection électronique d’objets et déterminer leur position par rapport au véhicule et, le cas échéant, leur vitesse de déplacement. Ensuite, les algorithmes d’apprentissage automatique exécutés sur ordinateur. Ceux-ci ont pour tâche de traiter les relevés des capteurs afin d’en déduire des informations clés concernant l’objet détecté par les capteurs, comme sa nature.
S’agit-il par exemple d’un autre véhicule, d’un panneau de signalisation ou d’un piéton ? Chaque classe d’objets est associée à un ensemble de paramètres connexes que les systèmes de contrôle du véhicule doivent connaître. Bon nombre de ces technologies sont déjà intégrées – quoique de façon limitée – aux systèmes avancés d’aide à la conduite (ADAS), mais l’automatisation complète d’un véhicule nécessite des capteurs plus sophistiqués.
Les technologies de capteurs de base
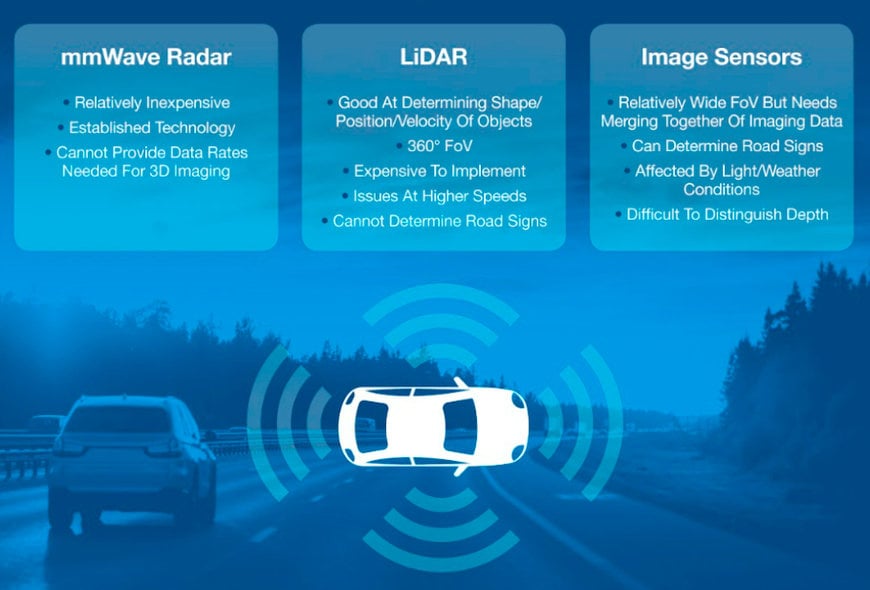
Trois technologies de capteurs revêtent une importance capitale si l’on veut permettre à un véhicule autonome de percevoir son environnement. Il s’agit du lidar, du radar et des caméras.
Les ADAS utilisent déjà le radar pour des dispositifs tels que le freinage d’urgence et le régulateur de vitesse adaptatif. Dans des véhicules entièrement autonomes, le radar continue d’être utilisé pour différentes fonctions de détection clés et à différentes vitesses de déplacement du véhicule, notamment pour le stationnement automatique et le changement de voie sur autoroute, ou lorsque la circulation est ralentie. Les modules radar dernier cri fonctionnent à des longueurs d’onde millimétriques (mmWave) – généralement à une fréquence de 77 GHz – et sont capables de détecter rapidement la distance, la vitesse et l’angle de plusieurs objets, quelles que soient les conditions météorologiques.
Ces modules récemment mis sur le marché sont compacts, peu coûteux et offrent une technologie de détection d’autant plus fiable que le radar est une technologie mûre. Cependant, cette technologie a ses limites, entre autres la quantité de données relatives à un objet qu’un radar est capable de fournir et la vitesse à laquelle il peut les fournir.
Le lidar est une technologie similaire au radar, si ce n’est qu’elle utilise des impulsions de lumière émises depuis une source laser à la place d’ondes millimétriques. Cette technologie est capable de réaliser des balayages dans les trois dimensions, et ce, plusieurs millions de fois par seconde, dans le but de créer rapidement une carte virtuelle de l’environnement du véhicule. Les constructeurs automobiles ont largement adopté le lidar pour l’intégrer à des systèmes autonomes afin de créer une « vue du dessus » dynamique permettant de visualiser la forme et la profondeur d’objets comme des véhicules, des piétons ou des panneaux de signalisation.
Le lidar est une technologie de détection complémentaire au radar, car chacune convient à des applications spécifiques. Un bel exemple de lidar est l’Alpha Prime de Velodyne. Il s’agit d’un capteur haute résolution à 128 canaux avec un champ de vision horizontal de 360°, un champ de vision vertical de 40°, une plage de détection pouvant atteindre 300 m et une précision de résolution de +/-3 cm. Avec une fréquence d’images de 20 kHz, il peut fournir jusqu’à 4,6 millions de points de données d’objets par seconde. Velodyne continue de développer des capteurs de nouvelle génération pour ses clients du secteur automobile parmi lesquels nous pouvons citer Ford, Honda, Tesla et Mercedes-Benz.
À eux deux, le lidar et le radar génèrent énormément de détails pour alimenter les systèmes de navigation de véhicule, mais cela reste insuffisant pour satisfaire à toutes les exigences. Certaines tâches de détection d’images nécessitent une interprétation plus complexe de l’image observée. C’est le cas de la reconnaissance des panneaux de signalisation, par exemple. Cette tâche, comme d’autres tâches similaires, requiert des caméras haute définition.
En plaçant des caméras HD avec des objectifs grand-angles à l’avant, sur les côtés et à l’arrière du véhicule, celui-ci dispose enfin d’une vue en temps réel et à 360° de son environnement, sans angles morts. La combinaison des images des caméras aux informations des capteurs lidar et radar permet aux systèmes autonomes de disposer d’une vue véritablement représentative sur laquelle fonder leurs décisions de navigation.
Comme nous l’évoquions dans notre article précédent, « Automatisation des véhicules : les étapes clés », l’autonomie complète (niveau SAE 5) signifie que le véhicule est capable de se déplacer à toutes les vitesses, dans toutes les conditions météorologiques et sans aucune assistance humaine. Cela suppose une dépendance totale aux multiples capteurs qui fournissent au véhicule une vue en temps réel non seulement de la route, mais de tout ce qui entoure le véhicule : piétons, mobilier urbain, etc. Le présent épisode de notre série d’articles nous a permis de faire connaissance avec trois des principales technologies de capteurs utilisées par les véhicules autonomes, mais c'est certain qu’à terme, d’autres technologies de capteurs viendront les compléter à mesure qu’elles seront développées.
Un autre aspect critique de la conception de véhicules autonomes est la mise en œuvre de systèmes et de capteurs redondants, de sorte que la défaillance d’un capteur n’empêche pas l’ensemble du véhicule de fonctionner en toute sécurité. Il va sans dire que la redondance est une précaution très coûteuse, mais indispensable pour s’assurer que les véhicules ne mettent pas la vie en danger.
www.mouser.com
